

Foot‑Strike Dynamics in Sprinting
- Antonio Robustelli

- May 19
- 8 min read
If you watch an elite sprinter at maximal velocity, the first thing that stands out is how little seems to happen. The movement looks clean, almost effortless, as if the athlete is simply letting speed carry them forward. But beneath that apparent simplicity lies a highly constrained biomechanical principle: the entire expression of sprinting is shaped by the way the foot touches the ground. Foot strike is not a detail, however it is the organizing event around which the rest of the stride is built.
The more you study and observe the sprinting task, the more you realize that foot strike is not something the athlete “does.” The dynamics of foot strike emerges from the timing of the swing leg, the velocity of the foot relative to the center of mass (COM), the stiffness of the lower limb, and the speed at which the athlete is moving. When these elements fall into place, the foot impact the ground with the right timing and the right velocity, and the athlete can transmit force efficiently. When they do not, the entire stride is being affected.
This article works through the mechanics that govern foot strike — timing, foot velocity, force transmission, and the often-ignored principle that foot placement is fundamentally dictated by movement speed. The goal is to lay out the underlying logic that makes efficient sprinting possible.
Timing as the Foundation of Foot Strike
The first thing to understand is that foot strike is a timing event. The foot has to arrive at the ground at the exact moment the body is ready to accept and redirect force. That timing isn't arbitrary. It's governed by the coordination of the swing leg, the pelvis, and the trunk — and by the trajectory of the COM.
In efficient sprinting, the foot contacts the ground slightly ahead of the COM, but only by the minimal distance required to generate vertical support and horizontal propulsion. Mann and Herman (1985) documented this in their kinematic analysis of elite sprinters, observing that the foot lands just ahead of the COM in a configuration consistent with minimizing braking. The key is not the position itself, but the timing that produces it.

When the foot strikes the ground too early, the COM is still behind the point of contact. The athlete experiences excessive braking, ground contact time increases, and the next stride is compromised. When the foot strikes too late, the COM has already moved ahead of the base of support, and the athlete collapses into the ground. The leg cannot achieve the stiffness required for efficient force transmission, and vertical support is lost.
Correct timing aligns foot strike with the moment of peak hip extension velocity. This alignment allows the leg to “lock” into a rigid configuration just before impact, ensuring that the tissues are pre‑tensed and ready to accept load. Research on joint stiffness in sprint running supports this — Kuitunen, Komi and Kyrolainen (2002) showed that knee and ankle stiffness are tightly regulated during sprinting, with the leg behaving as a pre-loaded spring system that must be configured before contact, not during it.
When timing is right, the foot does not simply fall to the ground, it meets the ground with purpose, precision, and mechanical readiness. When timing is wrong, no amount of strength or power can compensate.
Foot Velocity and COM Velocity: Symmetry Minimizes Braking
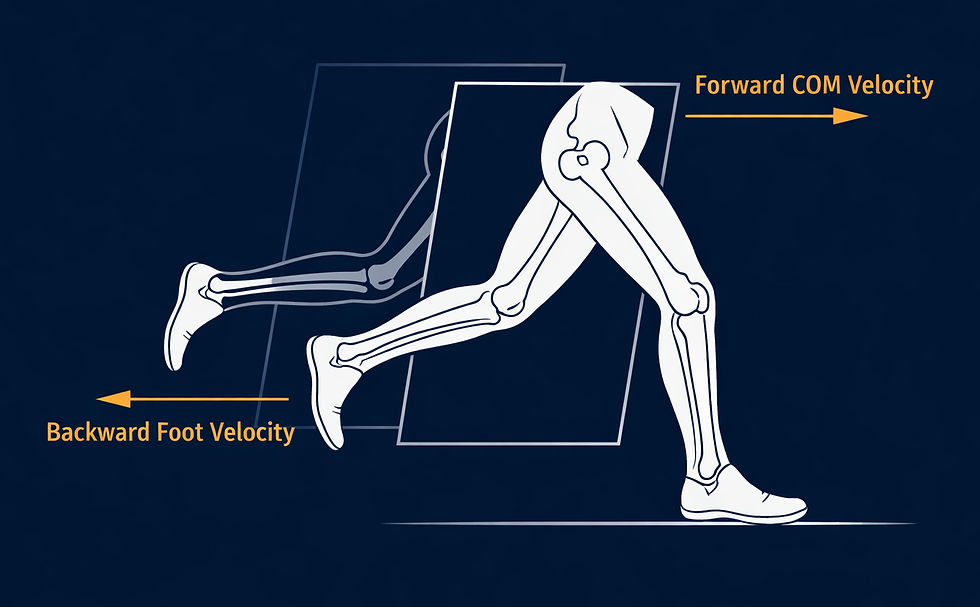
If timing determines when the foot meets the ground, foot velocity determines how it meets the ground. One of the most important — and most misunderstood — principles in sprint biomechanics is that the foot should be traveling backward at touchdown at a velocity close to the forward velocity of the COM.
This backward motion isn't a question of style. It's mechanically necessary to minimize braking forces. When the foot's backward velocity closely matches the COM's forward velocity, the foot's horizontal speed relative to the ground approaches zero at the moment of contact. That creates a brief symmetry that reduces the horizontal braking impulse and allows the athlete to transition straight into force production.
This principle is supported by the work of Weyand and colleagues (2000), who demonstrated that elite sprinters achieve high speeds not by increasing stride length but by applying greater forces in shorter ground contact times. Minimizing braking is essential to that process. Clark, Ryan and Weyand (2014) demonstrated that the velocity of the lower limb at touchdown is a key mechanical input driving the distinctive ground reaction force signature of elite sprinters — faster runners increase lower-limb velocity at contact to elevate collisional impulse and attain higher speeds.
When the foot is too slow at touchdown, the ground effectively catches the foot, producing a spike in braking forces. The athlete must absorb more energy before being able to produce force, which lengthens ground contact time and disrupts the rhythm of the stride. When the foot is too fast, it contacts the ground prematurely, before the leg has reached the stiffness required for efficient force transmission. The athlete collapses into the ground, losing vertical support and compromising the next stride.
The optimal condition — backward foot velocity matching forward COM velocity — is therefore not an isolated variable but the emergent result of coordinated swing mechanics, pelvic control, trunk stability, and elastic recoil. It is a hallmark of efficient sprinting and a key determinant of maximal velocity performance.
Force Transmission and Time on the Ground
One of the most persistent misconceptions in sprint coaching is the idea that athletes should aim to “get off the ground quickly”. This idea confuses cause and effect. Elite sprinters do not achieve short contact times by trying to leave the ground early; they achieve them because they transmit force rapidly.
Ground contact time is not a target but a consequence. The goal is to apply large forces in a very short period. This requires the leg to be stiff at impact, the ankle to behave like a rigid spring, and the hip–knee–ankle chain to coordinate force transmission efficiently. When these conditions are met, the foot naturally leaves the ground quickly because the force cycle has been completed.
Attempting to minimize contact time artificially disrupts that process. Athletes who try to escape the ground early often fail to complete hip extension, reduce horizontal impulse, and compromise stride timing. There's also a real risk of hamstring overload when muscles are forced to compensate for a lack of coordinated force transmission.
The research is clear on this. Morin, Samozino and Brughelli (2015) showed that in elite sprinters, sprint acceleration performance is determined primarily by the magnitude of propulsive horizontal impulse — faster sprinters are those who push more forcefully into the ground, not simply those who shorten contact time. Hunter, Marshall and McNair (2005) similarly demonstrated that propulsive ground reaction force impulse is a key kinematic and kinetic determinant of sprint-running acceleration performance.
Elite sprinters attack the ground. Their foot strike is defined by stiffness, precision, and intent — not bouncing, not tapping. They strike with the mechanical readiness to transmit force, and the foot stays in contact just long enough to complete that cycle. No longer.
Speed Dictates Foot Placement
Perhaps the most overlooked principle in sprint biomechanics is that foot placement is dictated by the speed of movement. The faster the athlete moves, the more the mechanics of foot strike must adapt to the demands imposed by that speed. Foot placement is not a technique that can be taught in isolation; it is the mechanical consequence of the velocity at which the athlete is traveling.
At slow speeds, such as jogging or submaximal running, the COM moves forward at a modest velocity. The foot can land closer to the COM, the leg does not require extreme stiffness, and the backward foot velocity requirement is low. The shin angle at touchdown is more vertical, and the athlete can afford greater variability in foot placement.
As speed increases, the demands change. The COM moves faster, requiring the foot to land slightly further ahead to maintain support. Backward foot velocity must increase, the leg must stiffen earlier, and the shin angle becomes more acute. The athlete begins to adopt mechanics that resemble sprinting, even if the speed is not yet maximal.
At maximal sprinting speeds, the demands become extreme. The COM is moving at very high velocity, and the foot must land with extraordinary precision. Backward foot velocity must nearly match COM velocity, the leg must be pre‑tensed and rigid, and the ankle must behave like a stiff spring. The shin angle at touchdown becomes highly specific, and the window for timing errors narrows dramatically.
None of these adaptations are deliberate. The athlete does not decide to place the foot in a particular location. The speed of movement dictates where the foot must land, how fast it must be moving, and how stiff the leg must be. The mechanics of foot placement are therefore emergent properties of the sprinting system, not isolated technical elements.
Clark, Ryan and Weyand (2014) showed this directly: by increasing lower-limb velocity at touchdown, runners elevate ground reaction forces in a predictable, speed-dependent way. The mechanical demands on the foot-ground interaction change systematically as velocity increases, and the athlete's mechanics adapt because they must.
Foot Strike as a Result of Swing‑Phase Quality
A critical insight in sprint biomechanics is that foot strike is determined by what happens in the air, not on the ground. The stance phase is too short to correct errors. By the time contact happens, the outcome has already been set by what occurred in the air.
The swing leg must recover efficiently, decelerate at the right moment, and retract with the appropriate velocity. The pelvis must remain stable, the trunk must maintain alignment, and the hip flexors must contribute elastic recoil. When these elements are coordinated, the foot strikes the ground with the correct timing, velocity, and stiffness. When they're not, no cue given during stance will fix the problem — because the problem was upstream.

This is supported by the work of Dorn, Schache and Pandy (2012), who showed that above approximately 7 m/s, increasing running speed shifts from relying on ankle plantarflexor force during stance to relying on the hip muscles — iliopsoas, gluteus maximus, and hamstrings — to accelerate the legs more vigorously through the swing phase. At sprinting speeds, the swing phase becomes the primary mechanism for increasing stride frequency, which means the quality of swing-phase mechanics directly determines the conditions under which the foot arrives at the ground.
Conclusion
Foot‑strike dynamics are the biomechanical foundation of sprinting. The timing of foot strike, the velocity of the foot relative to the COM, the ability to transmit force rapidly, and the speed‑dependent logic of foot placement all converge to determine how efficiently an athlete can sprint. Foot strike is not an isolated event but the expression of the entire sprinting system.
Understanding these principles gives coaches and athletes something more useful than surface-level cues: a model of sprint performance grounded in biomechanics, physics, and the actual demands of high-speed human movement.
References
Clark, K. P., Ryan, L. J. and Weyand, P. G. (2014) 'Foot speed, foot-strike and footwear: linking gait mechanics and running ground reaction forces', Journal of Experimental Biology, 217(12), pp. 2037–2040.
Dorn, T. W., Schache, A. G. and Pandy, M. G. (2012) 'Muscular strategy shift in human running: dependence of running speed on hip and ankle muscle performance', Journal of Experimental Biology, 215(11), 1944–1956.
Hunter, J. P., Marshall, R. N. and McNair, P. J. (2005) 'Relationships between ground reaction force impulse and kinematics of sprint-running acceleration', Journal of Applied Biomechanics, 21(1), pp. 31–43.
Kuitunen, S., Komi, P. V. and Kyröläinen, H. (2002) 'Knee and ankle joint stiffness in sprint running', Medicine & Science in Sports & Exercise, 34(1), 166–173.
Mann, R. and Herman, J. (1985) 'Kinematic analysis of Olympic sprint performance: men's 200 meters', International Journal of Sport Biomechanics, 1(2), 151–162.
Morin, J. B., Samozino, P. and Brughelli, M. (2015) 'A simple method for measuring force, velocity and power output during sprint running', Journal of Biomechanics, 48(12), 3475–3478.
Weyand, P. G., Sternlight, D. B., Bellizzi, M. J. and Wright, S. (2000) 'Faster top running speeds are achieved with greater ground forces not more rapid leg movements', Journal of Applied Physiology, 89(5), 1991–1999.

Antonio Robustelli is the mastermind behind Omniathlete. He is an international high performance consultant and sought-after speaker in the area of Sport Science and Sports Medicine, working all over the world with individual athletes (including participation in the last 5 Olympics) as well as professional teams in soccer, basketball, rugby, baseball since 24 years. Currently serving as Faculty Member and Programme Leader at the National Institute of Sports in India (SAI-NSNIS).



Comments